Here are the essential concepts you must grasp in order to answer the question correctly.
Torque
Torque is a measure of the rotational force applied to an object, calculated as the product of the force and the distance from the pivot point (lever arm) at which the force is applied. It is given by the formula τ = r × F × sin(θ), where τ is torque, r is the radius, F is the force, and θ is the angle between the force vector and the lever arm. Understanding torque is essential for analyzing how forces cause rotational motion.
Recommended video:
Net Torque & Sign of Torque
Net Torque
Net torque is the vector sum of all individual torques acting on an object. It determines the overall rotational effect on the object and is crucial for predicting its angular acceleration according to Newton's second law for rotation, τ_net = Iα, where I is the moment of inertia and α is the angular acceleration. Calculating the net torque involves considering the direction and magnitude of each contributing torque.
Recommended video:
Net Torque & Sign of Torque
Force Components
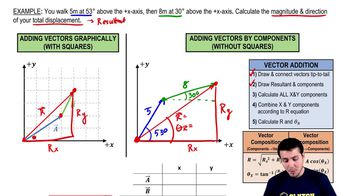
Forces can be resolved into components that act along specific axes, typically horizontal and vertical. This is particularly important in torque problems, where forces applied at angles must be broken down into their perpendicular and parallel components relative to the radius of the wheel. Understanding how to decompose forces allows for accurate calculations of the torques they produce about a pivot point.
Recommended video:
Vector Addition By Components




 08:55
08:55