Here are the essential concepts you must grasp in order to answer the question correctly.
Relative Velocity
Relative velocity is the velocity of an object as observed from a particular reference frame. In this scenario, the velocity of the scooter must be calculated relative to the flatcar, which is itself moving. This involves subtracting the velocity of the flatcar from the scooter's velocity relative to the ground to find the scooter's speed and direction relative to the flatcar.
Recommended video:
Intro to Relative Motion (Relative Velocity)
Frame of Reference
A frame of reference is a coordinate system used to measure the position and motion of objects. In this problem, the observer on the ground serves as one frame of reference, while the flatcar provides another. Understanding how different frames of reference affect the perception of motion is crucial for solving problems involving relative velocities.
Recommended video:
Inertial Reference Frames
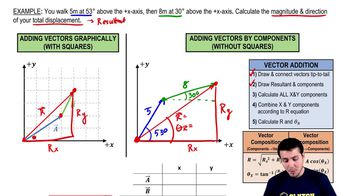
Vector Addition
Vector addition is the process of combining two or more vectors to determine a resultant vector. In this case, the velocities of the scooter and the flatcar are vectors that need to be added or subtracted based on their directions. Properly applying vector addition allows for accurate calculations of the scooter's velocity relative to the flatcar.
Recommended video:
Vector Addition By Components

 Verified step by step guidance
Verified step by step guidance This video solution was recommended by our tutors as helpful for the problem above.
This video solution was recommended by our tutors as helpful for the problem above.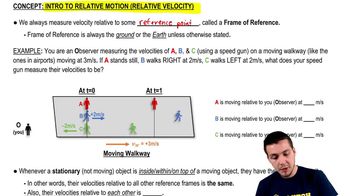
 04:27
04:27