4. 2D Kinematics
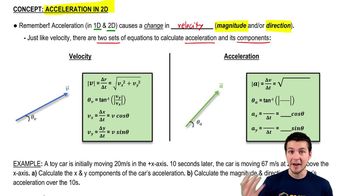
Acceleration in 2D
Problem 3.7c
Textbook Question
The coordinates of a bird flying in the xy-plane are given by x(t) = αt and y(t) = 3.0 m − βt2, where α = 2.4 m/s and β = 1.2 m/s2. (c) Calculate the magnitude and direction of the bird's velocity and acceleration at t = 2.0 s.
 Verified step by step guidance
Verified step by step guidance1
First, determine the velocity components of the bird. The velocity in the x-direction, v_x(t), is the derivative of x(t) with respect to time t. Since x(t) = αt, the derivative is v_x(t) = α. For the given α = 2.4 m/s, v_x(t) = 2.4 m/s.
Next, find the velocity in the y-direction, v_y(t), by differentiating y(t) with respect to time t. Given y(t) = 3.0 m − βt², the derivative is v_y(t) = -2βt. Substitute β = 1.2 m/s² to get v_y(t) = -2(1.2)t = -2.4t m/s.
Calculate the velocity components at t = 2.0 s. For v_x, it remains constant at 2.4 m/s. For v_y, substitute t = 2.0 s into v_y(t) = -2.4t to get v_y(2.0) = -2.4(2.0) = -4.8 m/s.
Determine the magnitude of the velocity vector using the Pythagorean theorem: |v| = √(v_x² + v_y²). Substitute v_x = 2.4 m/s and v_y = -4.8 m/s into the equation.
Find the direction of the velocity vector by calculating the angle θ with respect to the positive x-axis using the tangent function: θ = arctan(v_y/v_x). Substitute v_y = -4.8 m/s and v_x = 2.4 m/s into the equation.
Verified video answer for a similar problem:This video solution was recommended by our tutors as helpful for the problem above
Video duration:
11mWas this helpful?
Key Concepts
Here are the essential concepts you must grasp in order to answer the question correctly.
Kinematics in Two Dimensions
Kinematics involves the study of motion without considering the forces that cause it. In two dimensions, motion is described using position, velocity, and acceleration vectors. The position of an object is given by its coordinates, and its velocity and acceleration are the first and second derivatives of the position with respect to time, respectively.
Recommended video:
Guided course

 08:29
08:29Kinematics in 2D
Velocity and Acceleration Vectors
The velocity vector describes the rate of change of position with time and has both magnitude and direction. It is calculated by differentiating the position functions with respect to time. Similarly, the acceleration vector, which describes the rate of change of velocity, is found by differentiating the velocity functions. These vectors are crucial for understanding the motion of objects in the xy-plane.
Recommended video:
Guided course
 11:21
11:21Rotational Velocity & Acceleration
Magnitude and Direction of Vectors
The magnitude of a vector in two dimensions is found using the Pythagorean theorem, combining its components. The direction is determined by calculating the angle the vector makes with a reference axis, typically using the arctangent function. These calculations are essential for fully describing the velocity and acceleration of an object in motion.
Recommended video:
Guided course
 03:59
03:59Calculating Magnitude & Components of a Vector

Related Videos
Related Practice