Hello class, Professor Anderson here. Let's talk about a very simple torque problem and this is the one where you have a beam and then supporting that beam are two posts. There's one right at the end and then there's one located near the other end but not all the way at the end. And now you take a man, And he starts walking towards the end of the beam. Now, depending on the relative masses and so forth, you could get to a point where the man has walked so far to the end of that beam that the beam just starts to lift up off that back post. So when he gets out there, this side of the beam could lift up and the whole thing will topple over. And we want to figure out what that location is. How far does he have to walk along the beam for that to happen? So, to visualize this let's give some parameters first off. Let's say that the mass of the beam is M sub B. The mass of the person is M sub P. And we'll give some distances. So let's let the left side of our beam be at x equals zero. We'll say that this position right here is x1 and this position of the person is X. So as x increases eventually we'll get to a point of unstable equilibrium and the thing will tip. Alright, so let's analyze the forces that are acting on our beam. So we have the force due to this beam on the left, and that gives a normal force N zero. There's also a force due to this beam on the right, and that is a normal force N one. There is the mass of the beam acting down: MB times gravity. And let's say the man has made it all the way out to here, therefore there is the mass of the man– or the mass of the person times gravity acting down. So those are the forces that are acting on that beam, and now we need to analyze both the forces and the torques. So, forces in the x-direction are obviously zero. There's nothing pointing right or left. What about the forces in the y-direction? Well, we have N naught going up. We have N one going up. We have M B G going down and we have M P G going down. And all that has to add up to zero. Alright, now let's analyze the torques. So the torques are what? Well remember torque is equal to force times lever arm. And in this case, all the forces are at right angles to beam, so the lever arm is just how far is that force from the axis of rotation. So let's pick an axis of rotation. Let's say it's the left end of the beam, so post N naught, that will be our axis of rotation. And now let's analyze the torques. All right, some of the torques equals what? Well, N naught is the first force but if that's going right through the axis of rotation, then there's no lever arm. So that one is zero And now we have N one going up. And remember we said if it's trying to rotate it counterclockwise, that's a positive torque. So what is the x value for N one? It is X one. We have the mass of the beam pulling down and that's and that's trying to rotate it clockwise and so we give it a minus sign. So this is minus M sub B times G. And we have to figure out what the lever arm is for that and if it's a uniform beam then that center of mass is halfway down the beam. So this becomes L over 2. And then finally we have to analyze the person and we said that person is out a distance X from the axis, also trying to rotate the beam clockwise so we give it a minus sign and so this becomes M sub P times G times X. Okay, and now we have a few equations. The X equation doesn't really help us. The Y equation certainly does, and the torque equation certainly does. But let's see how many unknowns we have. We have N naught, N one and X. So that's not very good, right? We have three equations or two equations really and we have three unknowns, so we need another equation to help us and it is this– we have to think about the physics of it a little bit and so there is a condition for tipping. Namely, when this beam tips up, it loses contact with the post on the left– with post N naught. And so if the beam loses contact with the post, the post can't push up on that beam at all and so the condition is N naught equals zero. Okay, so let's see if we can solve this thing for X now. So, some of the forces in the y-direction told us we had this, but now we're saying N naught is equal to zero. So it's really N one minus M B G minus M P G is all equal to zero. And now we can solve this very quickly for N one. We move the other stuff to the other side and we can just lump sum terms together. And it looks like that: N one is equal to M B plus M P times G. And now let's go back to our torque equation. So torque was N zero was multiplying zero– that one's gone. We have N one times X 1 but N one is now this. So we have MB plus M P times G all times x1. Then we have minus M B G L over 2 and minus M P G times X. All of that equals 0. And now we can solve this equation for x. So if we move that last term over to the other side, we get x equals– we're gonna have to divide by M P G. And the rest of the terms are all this other stuff: MB plus MP GX1 minus... Ok so you can work out the torque equation and get a solution for X as I've shown here and depending on those values you'll get a real number for X. When you're all done, make sure that your value of X makes sense in terms of its location on the beam. All right, hopefully that's clear. If you have any questions, come see me in my office. Cheers.
Table of contents
- 0. Math Review31m
- 1. Intro to Physics Units1h 23m
- 2. 1D Motion / Kinematics3h 56m
- Vectors, Scalars, & Displacement13m
- Average Velocity32m
- Intro to Acceleration7m
- Position-Time Graphs & Velocity26m
- Conceptual Problems with Position-Time Graphs22m
- Velocity-Time Graphs & Acceleration5m
- Calculating Displacement from Velocity-Time Graphs15m
- Conceptual Problems with Velocity-Time Graphs10m
- Calculating Change in Velocity from Acceleration-Time Graphs10m
- Graphing Position, Velocity, and Acceleration Graphs11m
- Kinematics Equations37m
- Vertical Motion and Free Fall19m
- Catch/Overtake Problems23m
- 3. Vectors2h 43m
- Review of Vectors vs. Scalars1m
- Introduction to Vectors7m
- Adding Vectors Graphically22m
- Vector Composition & Decomposition11m
- Adding Vectors by Components13m
- Trig Review24m
- Unit Vectors15m
- Introduction to Dot Product (Scalar Product)12m
- Calculating Dot Product Using Components12m
- Intro to Cross Product (Vector Product)23m
- Calculating Cross Product Using Components17m
- 4. 2D Kinematics1h 42m
- 5. Projectile Motion3h 6m
- 6. Intro to Forces (Dynamics)3h 22m
- 7. Friction, Inclines, Systems2h 44m
- 8. Centripetal Forces & Gravitation7h 26m
- Uniform Circular Motion7m
- Period and Frequency in Uniform Circular Motion20m
- Centripetal Forces15m
- Vertical Centripetal Forces10m
- Flat Curves9m
- Banked Curves10m
- Newton's Law of Gravity30m
- Gravitational Forces in 2D25m
- Acceleration Due to Gravity13m
- Satellite Motion: Intro5m
- Satellite Motion: Speed & Period35m
- Geosynchronous Orbits15m
- Overview of Kepler's Laws5m
- Kepler's First Law11m
- Kepler's Third Law16m
- Kepler's Third Law for Elliptical Orbits15m
- Gravitational Potential Energy21m
- Gravitational Potential Energy for Systems of Masses17m
- Escape Velocity21m
- Energy of Circular Orbits23m
- Energy of Elliptical Orbits36m
- Black Holes16m
- Gravitational Force Inside the Earth13m
- Mass Distribution with Calculus45m
- 9. Work & Energy1h 59m
- 10. Conservation of Energy2h 54m
- Intro to Energy Types3m
- Gravitational Potential Energy10m
- Intro to Conservation of Energy32m
- Energy with Non-Conservative Forces20m
- Springs & Elastic Potential Energy19m
- Solving Projectile Motion Using Energy13m
- Motion Along Curved Paths4m
- Rollercoaster Problems13m
- Pendulum Problems13m
- Energy in Connected Objects (Systems)24m
- Force & Potential Energy18m
- 11. Momentum & Impulse3h 40m
- Intro to Momentum11m
- Intro to Impulse14m
- Impulse with Variable Forces12m
- Intro to Conservation of Momentum17m
- Push-Away Problems19m
- Types of Collisions4m
- Completely Inelastic Collisions28m
- Adding Mass to a Moving System8m
- Collisions & Motion (Momentum & Energy)26m
- Ballistic Pendulum14m
- Collisions with Springs13m
- Elastic Collisions24m
- How to Identify the Type of Collision9m
- Intro to Center of Mass15m
- 12. Rotational Kinematics2h 59m
- 13. Rotational Inertia & Energy7h 4m
- More Conservation of Energy Problems54m
- Conservation of Energy in Rolling Motion45m
- Parallel Axis Theorem13m
- Intro to Moment of Inertia28m
- Moment of Inertia via Integration18m
- Moment of Inertia of Systems23m
- Moment of Inertia & Mass Distribution10m
- Intro to Rotational Kinetic Energy16m
- Energy of Rolling Motion18m
- Types of Motion & Energy24m
- Conservation of Energy with Rotation35m
- Torque with Kinematic Equations56m
- Rotational Dynamics with Two Motions50m
- Rotational Dynamics of Rolling Motion27m
- 14. Torque & Rotational Dynamics2h 5m
- 15. Rotational Equilibrium3h 39m
- 16. Angular Momentum3h 6m
- Opening/Closing Arms on Rotating Stool18m
- Conservation of Angular Momentum46m
- Angular Momentum & Newton's Second Law10m
- Intro to Angular Collisions15m
- Jumping Into/Out of Moving Disc23m
- Spinning on String of Variable Length20m
- Angular Collisions with Linear Motion8m
- Intro to Angular Momentum15m
- Angular Momentum of a Point Mass21m
- Angular Momentum of Objects in Linear Motion7m
- 17. Periodic Motion2h 9m
- 18. Waves & Sound3h 40m
- Intro to Waves11m
- Velocity of Transverse Waves21m
- Velocity of Longitudinal Waves11m
- Wave Functions31m
- Phase Constant14m
- Average Power of Waves on Strings10m
- Wave Intensity19m
- Sound Intensity13m
- Wave Interference8m
- Superposition of Wave Functions3m
- Standing Waves30m
- Standing Wave Functions14m
- Standing Sound Waves12m
- Beats8m
- The Doppler Effect7m
- 19. Fluid Mechanics2h 27m
- 20. Heat and Temperature3h 7m
- Temperature16m
- Linear Thermal Expansion14m
- Volume Thermal Expansion14m
- Moles and Avogadro's Number14m
- Specific Heat & Temperature Changes12m
- Latent Heat & Phase Changes16m
- Intro to Calorimetry21m
- Calorimetry with Temperature and Phase Changes15m
- Advanced Calorimetry: Equilibrium Temperature with Phase Changes9m
- Phase Diagrams, Triple Points and Critical Points6m
- Heat Transfer44m
- 21. Kinetic Theory of Ideal Gases1h 50m
- 22. The First Law of Thermodynamics1h 26m
- 23. The Second Law of Thermodynamics3h 11m
- 24. Electric Force & Field; Gauss' Law3h 42m
- 25. Electric Potential1h 51m
- 26. Capacitors & Dielectrics2h 2m
- 27. Resistors & DC Circuits3h 8m
- 28. Magnetic Fields and Forces2h 23m
- 29. Sources of Magnetic Field2h 30m
- Magnetic Field Produced by Moving Charges10m
- Magnetic Field Produced by Straight Currents27m
- Magnetic Force Between Parallel Currents12m
- Magnetic Force Between Two Moving Charges9m
- Magnetic Field Produced by Loops and Solenoids42m
- Toroidal Solenoids aka Toroids12m
- Biot-Savart Law (Calculus)18m
- Ampere's Law (Calculus)17m
- 30. Induction and Inductance3h 37m
- 31. Alternating Current2h 37m
- Alternating Voltages and Currents18m
- RMS Current and Voltage9m
- Phasors20m
- Resistors in AC Circuits9m
- Phasors for Resistors7m
- Capacitors in AC Circuits16m
- Phasors for Capacitors8m
- Inductors in AC Circuits13m
- Phasors for Inductors7m
- Impedance in AC Circuits18m
- Series LRC Circuits11m
- Resonance in Series LRC Circuits10m
- Power in AC Circuits5m
- 32. Electromagnetic Waves2h 14m
- 33. Geometric Optics2h 57m
- 34. Wave Optics1h 15m
- 35. Special Relativity2h 10m
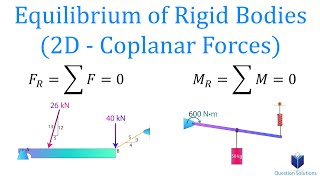
15. Rotational Equilibrium
Equilibrium with Multiple Supports
Video duration:
9mPlay a video:
Related Videos
Related Practice

 14:31
14:31