17. Periodic Motion
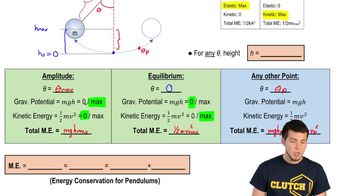
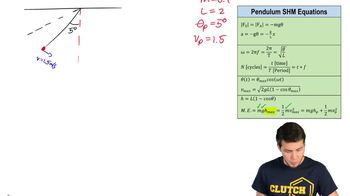
Energy in Pendulums
Problem 14.60c
Textbook Question
Textbook Question(II) A 0.735-kg block oscillates on the end of a spring whose spring constant is k = 41.0 N/m . The mass moves in a fluid which offers a resistive force F = ― bv, where b = 0.662 N • s/m .
(c) Write the displacement as a function of time if at t = 0, 𝓍 = 0, and at t = 1.00 s, 𝓍 = 0.120 m .
 Verified step by step guidance
Verified step by step guidance1
Step 1: Identify the type of motion. The problem describes a damped harmonic oscillator, where the block is attached to a spring and moves in a fluid providing a resistive force.
Step 2: Write the equation of motion for a damped harmonic oscillator. The general form is \( m \ddot{x} + b \dot{x} + kx = 0 \), where \( m \) is the mass, \( b \) is the damping coefficient, \( k \) is the spring constant, \( x \) is the displacement, \( \dot{x} \) is the velocity, and \( \ddot{x} \) is the acceleration.
Step 3: Solve the characteristic equation to find the angular frequency of the damped oscillator. The characteristic equation derived from the differential equation is \( m \lambda^2 + b \lambda + k = 0 \). Solve this quadratic equation to find \( \lambda \), which will be used to determine the angular frequency \( \omega_d \).
Step 4: Determine the form of the displacement function. For an underdamped system, the displacement as a function of time can be expressed as \( x(t) = A e^{-\zeta \omega_n t} \cos(\omega_d t + \phi) \), where \( A \) is the amplitude, \( \zeta \) is the damping ratio, \( \omega_n \) is the natural frequency, \( \omega_d \) is the damped angular frequency, and \( \phi \) is the phase constant.
Step 5: Use the initial conditions to find the constants \( A \) and \( \phi \). At \( t = 0 \), \( x = 0 \), which can be used to find \( \phi \). At \( t = 1.00 s \), \( x = 0.120 m \), use this to calculate the amplitude \( A \).
Recommended similar problem, with video answer:
Verified SolutionThis video solution was recommended by our tutors as helpful for the problem above
Video duration:
9mWas this helpful?
Key Concepts
Here are the essential concepts you must grasp in order to answer the question correctly.
Simple Harmonic Motion (SHM)
Simple Harmonic Motion describes the oscillatory motion of an object where the restoring force is directly proportional to the displacement from an equilibrium position. In this case, the block attached to the spring exhibits SHM, characterized by a sinusoidal displacement over time. The motion can be described using equations that incorporate parameters like mass and spring constant.
Recommended video:
Guided course

 07:52
07:52Simple Harmonic Motion of Pendulums
Damping
Damping refers to the effect of resistive forces, such as friction or drag, that reduce the amplitude of oscillations over time. In this scenario, the fluid provides a damping force proportional to the velocity of the block, which affects the overall motion. The damping coefficient 'b' quantifies this resistive force, influencing how quickly the oscillations diminish.
Recommended video:
Guided course
 09:40
09:40LRC Circuits
Differential Equations in Oscillatory Motion
The motion of the block can be described using differential equations that relate displacement, velocity, and acceleration. These equations take into account both the restoring force from the spring and the damping force from the fluid. Solving these equations allows us to express displacement as a function of time, incorporating initial conditions to find specific solutions.
Recommended video:
Guided course
 07:18
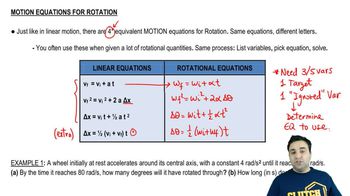
07:18Equations of Rotational Motion
 6:53m
6:53mWatch next
Master Energy in Pendulums with a bite sized video explanation from Patrick Ford
Start learningRelated Videos
Related Practice