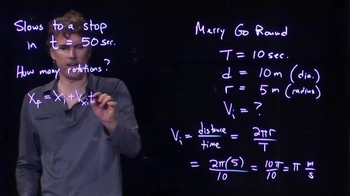
Hello class. Professor Anderson here. Let's talk about rotational motion. We're a little bit familiar with this idea of rotational motion already, but let's formalize it a little bit more. And let's convince you that it's maybe not quite as bad as it seems. Okay, when we talk about rotational motion, what do we really mean? Well, if we draw an xy coordinate system then rotational motion is just an object moving around in a circle like so. And we can define a few things to characterize that circle; the radius, r, of the circle; the angle, theta, between the line to the object and the x axis. We can also talk about the angular speed of the object and we can also talk about alpha; the angular acceleration. These are the important variables; theta, omega, and alpha. And in fact the equations that describe rotational motion are nearly identical to the ones that describe linear motion. We're just changing the variables. So for instance when we are thinking about linear motion we said; we're going to have x and we're going to have v. And we know that v is dx/dt. And we're going to have a. We know that a is dv/dt. And now in rotational we're going to do the same stuff, just changing the variables. So instead of an x we're going to use theta. What's omega? Omega is d theta/dt. What is alpha? Alpha is d omega/dt. Omega is called the angular speed. Alpha is called the angular acceleration. Okay? Theta is of course the angle. And typically we use theta in radians. Now, if we're making these substitutions we also realize that we have a whole set of equations -- the kinematic equations -- which govern motion, for instance this one; x final equals x initial plus vx initial times t plus one half a sub x t squared. That's one of those equations. And we can write the corresponding rotational equation like this; theta f equals theta i plus omega initial times t plus one half alpha t squared. All the math is exactly the same; we're just changing the variables. Now, there is a caveat with the kinematic equations. The kinematic equations apply when you have constant acceleration; a. If your acceleration is not constant, then you cannot use the kinematic equations. And so we have to be careful when we write these equations down over here, the caveat is constant, angular acceleration alpha. But if you have constant alpha you can use all of those kinematic equations that we developed before. Okay? Now, we also learned a little bit about some other terms in linear motion, like work. Let's see how that applies to rotational motion. Work -- w -- we said was the integral of f sub xdx where we're going to integrate from some initial position to some final position. We wrote it with a dot product before, but this is the same information here. f is the x component of the force, okay? Which is what the dots -- the dot product does, it picks out the x component. In rotational motion now, we're going to integrate from theta i to theta f. We're not dealing with a force anymore. We are in fact dealing with a new term -- torque -- and we have to integrate over angle. This thing -- Tao -- is torque. Okay? And torque is to rotational motion what force is to linear motion. So if I take a box and I put a force on it it will accelerate. If I take a wheel and I put a torque on it it will angularly accelerate. Okay? We also know that when things are moving they have kinetic energy. And the kinetic energy that we write with a capital K is just one half mv squared. If things are rotating they also have energy and we call that rotational kinetic energy; one half i omega squared. And now we've introduced yet another term; i, which is the moment of inertia. So in the linear case, objects have mass and if they're moving at speed v then they have kinetic energy. In the rotational case, objects have moments of inertia and if they are rotating at omega then they have rotational kinetic energy. Okay? And so you can actually store a lot of energy in rotating things, right? You have a big flywheel in a bus, when you come to a stop, instead of applying brakes, which is really just friction, right? Two brake pads hitting a piece of metal and it heats up the metal, okay? And you lose all that energy as heat. You can take a different approach, which is; let's spin up a flywheel and now you have a big rotating disk inside the bus and then when you start the bus up again you can tap into that energy and suck it back out. Okay? So they actually do use these giant rotating flywheels in busses and trains. Okay? Not in smaller cars because they're typically big, heavy wheels, but it's a way to transfer energy between systems. We also talked a little bit about power. And one of the things we said about power was; power, in the linear case, is equal to force times velocity. Okay? You apply a certain force to get your car moving and v, the velocity, is how fast you're going of course. So the power use goes like f times v. In the rotational case now, we don't use f anymore, we use torque. And we don't use v anymore, we use angular velocity omega. All right? So that's how much power is in a rotational system. So the whole point here is; everything that we've learned so far in linear kinematics applies to rotational kinematics if you just change variables. And so this is the trick is sort of convincing yourself that there's nothing that complicated here, I just have to start using some different letters. All right? And these -- in rotational -- are apparently usually Greek; Tao and omega, alpha, theta. And these over here are typically English letters.
- 0. Math Review31m
- 1. Intro to Physics Units1h 23m
- 2. 1D Motion / Kinematics3h 56m
- Vectors, Scalars, & Displacement13m
- Average Velocity32m
- Intro to Acceleration7m
- Position-Time Graphs & Velocity26m
- Conceptual Problems with Position-Time Graphs22m
- Velocity-Time Graphs & Acceleration5m
- Calculating Displacement from Velocity-Time Graphs15m
- Conceptual Problems with Velocity-Time Graphs10m
- Calculating Change in Velocity from Acceleration-Time Graphs10m
- Graphing Position, Velocity, and Acceleration Graphs11m
- Kinematics Equations37m
- Vertical Motion and Free Fall19m
- Catch/Overtake Problems23m
- 3. Vectors2h 43m
- Review of Vectors vs. Scalars1m
- Introduction to Vectors7m
- Adding Vectors Graphically22m
- Vector Composition & Decomposition11m
- Adding Vectors by Components13m
- Trig Review24m
- Unit Vectors15m
- Introduction to Dot Product (Scalar Product)12m
- Calculating Dot Product Using Components12m
- Intro to Cross Product (Vector Product)23m
- Calculating Cross Product Using Components17m
- 4. 2D Kinematics1h 42m
- 5. Projectile Motion3h 6m
- 6. Intro to Forces (Dynamics)3h 22m
- 7. Friction, Inclines, Systems2h 44m
- 8. Centripetal Forces & Gravitation7h 26m
- Uniform Circular Motion7m
- Period and Frequency in Uniform Circular Motion20m
- Centripetal Forces15m
- Vertical Centripetal Forces10m
- Flat Curves9m
- Banked Curves10m
- Newton's Law of Gravity30m
- Gravitational Forces in 2D25m
- Acceleration Due to Gravity13m
- Satellite Motion: Intro5m
- Satellite Motion: Speed & Period35m
- Geosynchronous Orbits15m
- Overview of Kepler's Laws5m
- Kepler's First Law11m
- Kepler's Third Law16m
- Kepler's Third Law for Elliptical Orbits15m
- Gravitational Potential Energy21m
- Gravitational Potential Energy for Systems of Masses17m
- Escape Velocity21m
- Energy of Circular Orbits23m
- Energy of Elliptical Orbits36m
- Black Holes16m
- Gravitational Force Inside the Earth13m
- Mass Distribution with Calculus45m
- 9. Work & Energy1h 59m
- 10. Conservation of Energy2h 54m
- Intro to Energy Types3m
- Gravitational Potential Energy10m
- Intro to Conservation of Energy32m
- Energy with Non-Conservative Forces20m
- Springs & Elastic Potential Energy19m
- Solving Projectile Motion Using Energy13m
- Motion Along Curved Paths4m
- Rollercoaster Problems13m
- Pendulum Problems13m
- Energy in Connected Objects (Systems)24m
- Force & Potential Energy18m
- 11. Momentum & Impulse3h 40m
- Intro to Momentum11m
- Intro to Impulse14m
- Impulse with Variable Forces12m
- Intro to Conservation of Momentum17m
- Push-Away Problems19m
- Types of Collisions4m
- Completely Inelastic Collisions28m
- Adding Mass to a Moving System8m
- Collisions & Motion (Momentum & Energy)26m
- Ballistic Pendulum14m
- Collisions with Springs13m
- Elastic Collisions24m
- How to Identify the Type of Collision9m
- Intro to Center of Mass15m
- 12. Rotational Kinematics2h 59m
- 13. Rotational Inertia & Energy7h 4m
- More Conservation of Energy Problems54m
- Conservation of Energy in Rolling Motion45m
- Parallel Axis Theorem13m
- Intro to Moment of Inertia28m
- Moment of Inertia via Integration18m
- Moment of Inertia of Systems23m
- Moment of Inertia & Mass Distribution10m
- Intro to Rotational Kinetic Energy16m
- Energy of Rolling Motion18m
- Types of Motion & Energy24m
- Conservation of Energy with Rotation35m
- Torque with Kinematic Equations56m
- Rotational Dynamics with Two Motions50m
- Rotational Dynamics of Rolling Motion27m
- 14. Torque & Rotational Dynamics2h 5m
- 15. Rotational Equilibrium3h 39m
- 16. Angular Momentum3h 6m
- Opening/Closing Arms on Rotating Stool18m
- Conservation of Angular Momentum46m
- Angular Momentum & Newton's Second Law10m
- Intro to Angular Collisions15m
- Jumping Into/Out of Moving Disc23m
- Spinning on String of Variable Length20m
- Angular Collisions with Linear Motion8m
- Intro to Angular Momentum15m
- Angular Momentum of a Point Mass21m
- Angular Momentum of Objects in Linear Motion7m
- 17. Periodic Motion2h 9m
- 18. Waves & Sound3h 40m
- Intro to Waves11m
- Velocity of Transverse Waves21m
- Velocity of Longitudinal Waves11m
- Wave Functions31m
- Phase Constant14m
- Average Power of Waves on Strings10m
- Wave Intensity19m
- Sound Intensity13m
- Wave Interference8m
- Superposition of Wave Functions3m
- Standing Waves30m
- Standing Wave Functions14m
- Standing Sound Waves12m
- Beats8m
- The Doppler Effect7m
- 19. Fluid Mechanics2h 27m
- 20. Heat and Temperature3h 7m
- Temperature16m
- Linear Thermal Expansion14m
- Volume Thermal Expansion14m
- Moles and Avogadro's Number14m
- Specific Heat & Temperature Changes12m
- Latent Heat & Phase Changes16m
- Intro to Calorimetry21m
- Calorimetry with Temperature and Phase Changes15m
- Advanced Calorimetry: Equilibrium Temperature with Phase Changes9m
- Phase Diagrams, Triple Points and Critical Points6m
- Heat Transfer44m
- 21. Kinetic Theory of Ideal Gases1h 50m
- 22. The First Law of Thermodynamics1h 26m
- 23. The Second Law of Thermodynamics3h 11m
- 24. Electric Force & Field; Gauss' Law3h 42m
- 25. Electric Potential1h 51m
- 26. Capacitors & Dielectrics2h 2m
- 27. Resistors & DC Circuits3h 8m
- 28. Magnetic Fields and Forces2h 23m
- 29. Sources of Magnetic Field2h 30m
- Magnetic Field Produced by Moving Charges10m
- Magnetic Field Produced by Straight Currents27m
- Magnetic Force Between Parallel Currents12m
- Magnetic Force Between Two Moving Charges9m
- Magnetic Field Produced by Loops and Solenoids42m
- Toroidal Solenoids aka Toroids12m
- Biot-Savart Law (Calculus)18m
- Ampere's Law (Calculus)17m
- 30. Induction and Inductance3h 37m
- 31. Alternating Current2h 37m
- Alternating Voltages and Currents18m
- RMS Current and Voltage9m
- Phasors20m
- Resistors in AC Circuits9m
- Phasors for Resistors7m
- Capacitors in AC Circuits16m
- Phasors for Capacitors8m
- Inductors in AC Circuits13m
- Phasors for Inductors7m
- Impedance in AC Circuits18m
- Series LRC Circuits11m
- Resonance in Series LRC Circuits10m
- Power in AC Circuits5m
- 32. Electromagnetic Waves2h 14m
- 33. Geometric Optics2h 57m
- 34. Wave Optics1h 15m
- 35. Special Relativity2h 10m
12. Rotational Kinematics
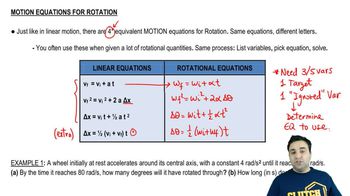
Equations of Rotational Motion
Video duration:
8mPlay a video:
Related Videos
Related Practice
 07:18
07:18