14. Torque & Rotational Dynamics
Net Torque & Sign of Torque
Problem 10.4`
Textbook Question
Three forces are applied to a wheel of radius 0.350 m, as shown in Fig. E10.4. One force is perpendicular to the rim, one is tangent to it, and the other one makes a 40.0° angle with the radius. What is the net torque on the wheel due to these three forces for an axis perpendicular to the wheel and passing through its center?

 Verified step by step guidance
Verified step by step guidance1
Identify the forces and their angles with respect to the radius of the wheel. From the image, we have F1 = 10.4 N at an angle of 49.0° with the radius, F2 = 15.0 N perpendicular to the radius, and F3 = 26.0 N tangent to the wheel.
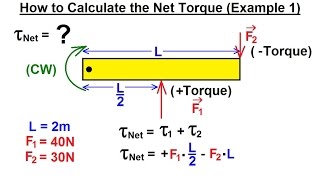
Recall that torque (τ) is given by the formula τ = r * F * sin(θ), where r is the radius, F is the force, and θ is the angle between the force and the radius. The radius of the wheel is 0.350 m.
Calculate the torque due to F1. Since F1 is at an angle, use τ1 = r * F1 * sin(49.0°). Substitute r = 0.350 m and F1 = 10.4 N into the equation.
Calculate the torque due to F2. Since F2 is perpendicular to the radius, the angle θ is 90°, and sin(90°) = 1. Use τ2 = r * F2. Substitute r = 0.350 m and F2 = 15.0 N into the equation.
Calculate the torque due to F3. Since F3 is tangent to the wheel, it is also perpendicular to the radius, so the angle θ is 90°, and sin(90°) = 1. Use τ3 = r * F3. Substitute r = 0.350 m and F3 = 26.0 N into the equation. Finally, sum the torques considering their directions to find the net torque on the wheel.
Verified video answer for a similar problem:This video solution was recommended by our tutors as helpful for the problem above
Video duration:
6mWas this helpful?
Key Concepts
Here are the essential concepts you must grasp in order to answer the question correctly.
Torque
Torque is a measure of the rotational force applied to an object, calculated as the product of the force and the lever arm distance from the axis of rotation. It is given by the formula τ = r × F × sin(θ), where r is the radius, F is the force, and θ is the angle between the force and the lever arm. Torque determines how effectively a force can rotate an object around an axis.
Recommended video:
Guided course

 08:55
08:55Net Torque & Sign of Torque
Lever Arm
The lever arm is the perpendicular distance from the axis of rotation to the line of action of the force. It is crucial in calculating torque because it determines the effectiveness of the force in causing rotational motion. A longer lever arm increases the torque for the same amount of force, making it easier to rotate the object.
Recommended video:
Guided course
 06:58
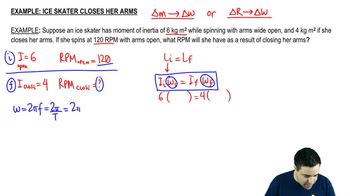
06:58Ice skater closes her arms
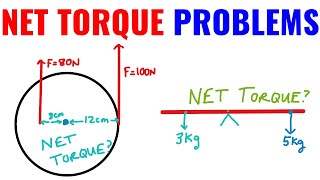
Net Torque
Net torque is the sum of all individual torques acting on an object, taking into account their directions. It determines the overall rotational effect on the object. If the net torque is zero, the object remains in rotational equilibrium, meaning it does not start rotating or change its rotational speed. Calculating net torque involves adding torques that cause rotation in the same direction and subtracting those that oppose it.
Recommended video:
Guided course
08:55Net Torque & Sign of Torque
 8:55m
8:55mWatch next
Master Net Torque & Sign of Torque with a bite sized video explanation from Patrick Ford
Start learningRelated Videos
Related Practice